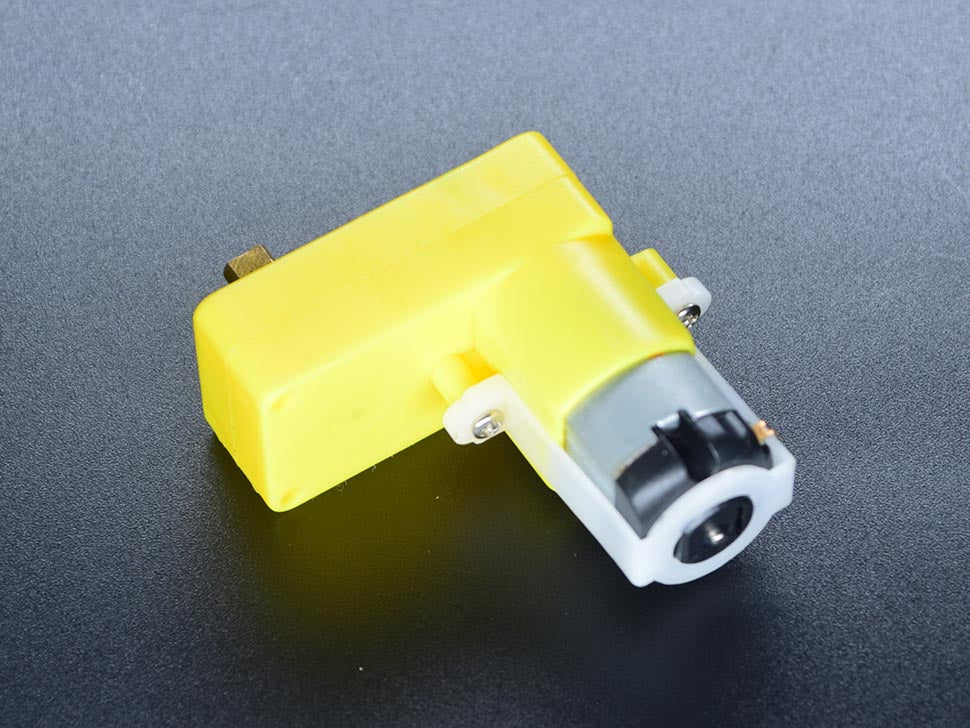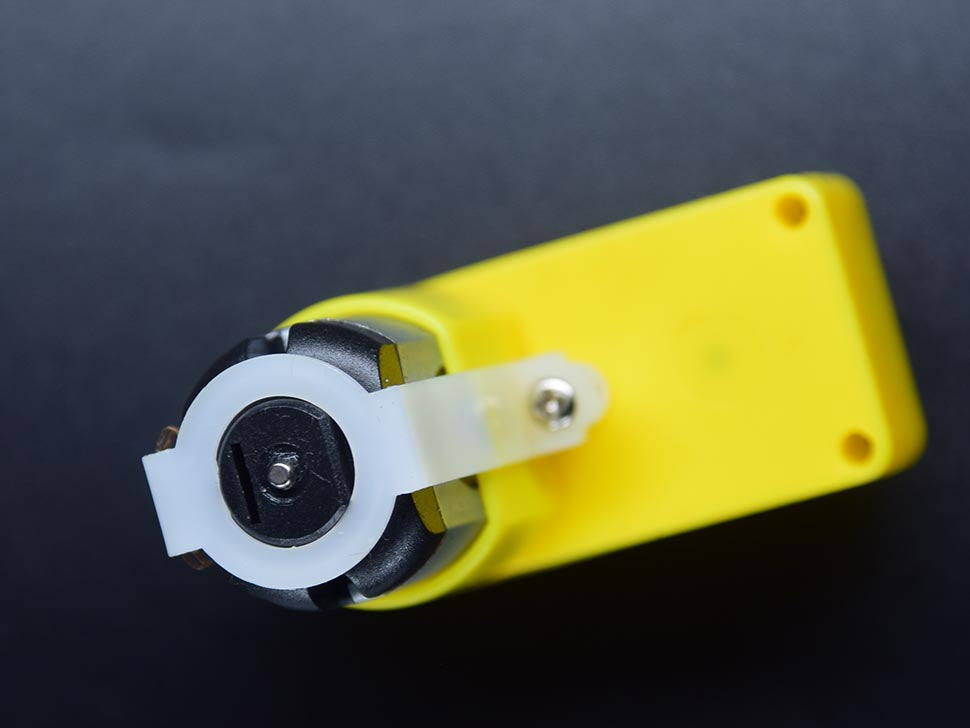

DC TT Geared Motor 6V 160RPM L Shape Metal Shaft - If you are wondering what kind of motor should you be using in a mobile robot, then this one is just the right component to be used.
This motor can be powered up from 3V to 6V, with a no-load speed of 160RPM at 6V and 60RPM at 3V. It could use up top 0.17A of your power supply at 6V and .14A at 3V. Its stall current is at 2.8A with a stall torque of 0.8kgf.cm and rated torque of 0.02kgf.cm. It has a metal gear, as well as a metal shaft that makes it more robust in terms of usage compare to plastic geared motors.
You could use this for your small-scale mobile robot projects.
Q1: How should a DC geared motor be chosen?
To determine whether the selected gear motor will result in any issues with the application, look for the following data in the performance calculations.
- Qualities Of Heat.
- Torque With Full Gearbox Load.
- Input Speed Of A Gearbox.
- A Gearbox's Yield Power.
- Sporadic duty considerations
Q2: What distinguishes geared from non-geared motors?
The DC Motor
Any group of electrical devices known as DC motors transforms direct current electrical energy into mechanical energy. Most of the motor types are dependent upon on the magnetic forces. Almost all DC motors have an internal mechanism that is either electromechanical or electronic. It Is there to occasionally shift directionof the motor's current.A linear motor creates force and motion in a straight line while the majority of types produce rotating motion.
Since they could be powered by existing direct-current lighting power distribution networks, DC motors were the first type that was often utilized. By adjusting the supply voltage or the amount of current flowing through the field winding of a DC motor, the speed can be varied over a wide range. The universal motor is a lightweight motor that can run on direct current and is used in portable power equipment and appliances. Larger DC motors are utilized for steel rolling mill drives, elevator and hoist propulsion, and electric vehicle propulsion. AC motors can now be used in many applications in place of DC motors thanks to the development of power electronics.
Geared DC Motors
Geared DC motors can be thought of as an extension of the DC motor, whose Insight features have previously been clarified here. A gear assembly is joined to a DC motor to create a geared motor. Motor speed is measured in terms of shaft revolutions per minute and is referred to as RPM. The gear assembly aids in lowering speed and raising torque. A gear motor's speed can be decreased to any desired value by using the right set of gears. Gear reduction is the idea that a vehicle can move at a slower pace while producing more torque. This insight will go over every small and significant aspect that goes into creating the gear head and, in turn, the operation of the geared DC motor.
Q3: What kinds of DC motors are there?
There are various types of DC motors suitable for various jobs across the industrial sector because DC motors are used in such a wide range of applications. Knowing the various DC motor types will also help you comprehend how they are utilized in various applications and which would be appropriate for your application. DC motors come in four primary categories:
1. Magnet, permanent The DC Motor
A permanent magnet produces the field flux in the permanent magnet motor. Despite having a limited amount of beginning torque and strong speed regulation, this type of DC motor is frequently used in low horsepower applications.
2. DC motors in series
A big wire carrying the entire armature current is looped briefly around the field of a series DC motor. Typically, series DC motors produce a significant amount of beginning torque but are unable to control speed and may even suffer damage if used without a load. They are not a good alternative for variable speed drive applications because of these limitations.
3. Shunt DC Motors
The field and armature windings are linked in parallel (shunt) in shunt DC motors. These motors have excellent speed regulation because the shunt field may be activated independently of the armature windings, which also makes it easier to manage to reverse.
4. Incorporated DC Motors
Compound DC motors have a separately excited shunt field, just like shunt DC motors. Although compound DC motors provide a considerable beginning torque, applications using variable speed drives may lead to control issues.
There are several potential applications for the four different types of DC motors. Every type of DC motor has advantages and disadvantages. Knowing them might help you determine which kinds are suitable for your purpose.
We also have the straight shaft version here and the gearbox 1:90 gear ratio.
QUICK SPECS:
- Gear ratio: 120:1
- No-load speed @ 6V: 160 rpm
- No-load speed @ 3V: 60 rpm
- No-load current @ 6V: 0.17A
- No-load current @ 3V: 0.14A
- Max Stall current: 2.8A
- Max Stall torque: 0.8kgf.cm
- Rated Torque: 0.2kgf.cm
- Encoder Operating Voltage: 4.5~7.5V
- Motor Operating Voltage: 3~7.5V (Rated voltage 6V)
- Operating Ambient Temperature: -10~+60℃
- Weight: 50g
DC TT Geared Motor 6V 160RPM L Shape Metal Shaft
DC TT Geared Motor 6V 160RPM L Shape Metal Shaft
Out of stock
Product Code
SKU:AB695
Couldn't load pickup availability